大家好,今天为大家分享一篇2026年1月29日发表在ENERGY & ENVIRONMENTAL MATERIALS的文献,题目为"Bioinspired Crossmodal Tactile Sensory Nerve for HighAccurate Object Recognition"。本文的第一作者是Delu Chen,本文的通讯作者是Xing Li, Yoshifumi Oshima, and Shaobo Cheng。
摘要
受人体体感系统的交叉模态感知能力启发,研究人员构建了一种人工交叉模态感觉神经元系统。该系统通过将压力-温度双模态传感器与基于(HZO)的互补忆阻器相结合,模拟了人体的触觉感知、神经编码和突触处理功能。所开发的双模态传感器能够采集压力和温度信息,并将其转化为电信号,其压力灵敏度高达26,407 ,温度灵敏度为-3.34% 。HZO互补忆阻器则能够实现信息存储并模拟生物突触功能,从而对感官信号进行仿生神经形态处理。在机器学习的辅助下,这一人工交叉模态感觉神经元系统在识别不同物体的温度和形状方面,展现了高达96.67%的准确率。这项工作展示了该集成系统在可穿戴人机交互界面和仿生机器人等先进神经形态硬件领域的应用潜力。
研究背景与系统设计
人体的触觉感官系统通过皮肤中的热感受器和机械感受器将外界刺激编码为神经信号,并传递至中枢神经系统进行解读,从而实现对接触物体的精确识别。然而,单一模态的感知能力在获取物体的纹理、形状、湿度等多种属性时存在局限性。因此,开发具备交叉模态感知能力的人工触觉系统,对于全面获取物体特征至关重要。
本研究构建的人工交叉模态感觉神经元系统(ACSNS)旨在模仿生物触觉感知过程。
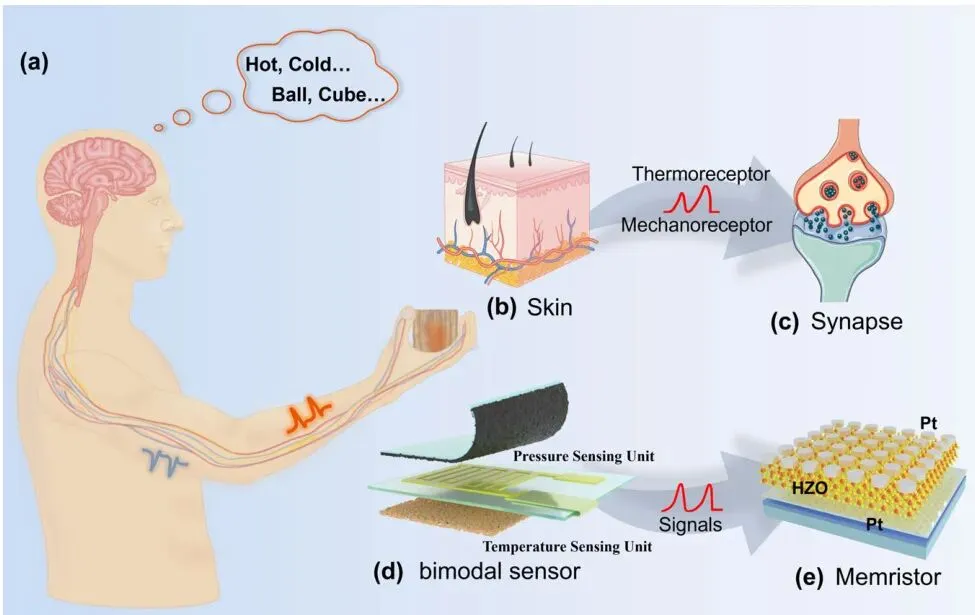
图1. 生物交叉模态感觉神经元系统与人工交叉模态感觉神经元系统(ACSNS)示意图。 a) 生物交叉模态感觉神经元系统识别接触物体的示意图。b) 皮肤中的热感受器和机械感受器将接收到的外部刺激传递给 c) 突触进行处理。d) 压力-温度双模态传感器将接收到的刺激信号传递给 e) 忆阻器进行处理。
如图1所示,生物系统中,皮肤感受器(图1b)将外界刺激转化为动作电位序列,传递给突触(图1c)进行处理。在本研究构建的人工系统中,压力-温度双模态传感器(图1d)扮演了触觉感受器的角色,将接收到的刺激转化为电信号。这些信号随后被传输到作为人工突触的忆阻器(图1e)中,通过改变其电导率来模拟突触的信号处理功能,最终输出突触后电流(PSC)。
压力-温度双模态传感器的性能
研究团队首先设计并制备了一款高性能的压力-温度双模态传感器,它如同电子皮肤,是整个系统的感知基础。
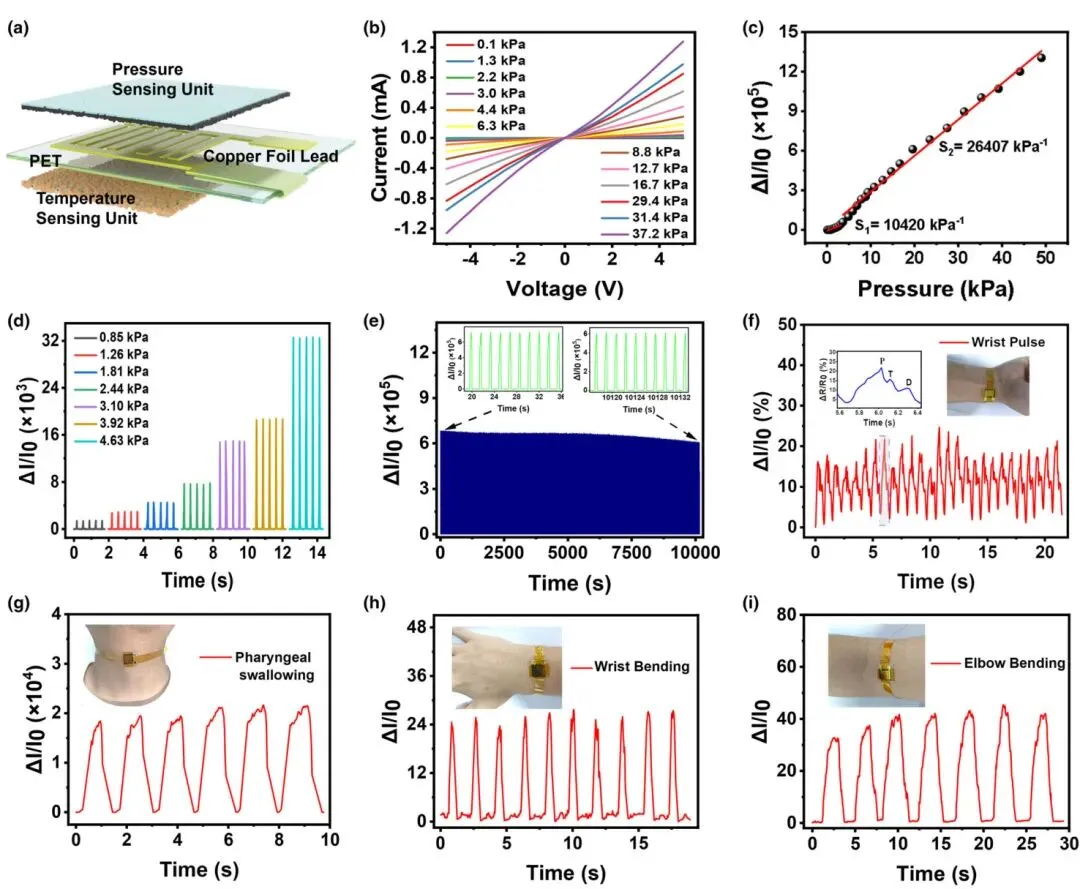
图2. 压力-温度双模态传感器的压感性能表征。 a) 压力-温度双模态传感器示意图。b) 不同压力下传感器的I-V曲线。c) 传感器在0.1至49 kPa压力范围内的电流响应。d) 传感器在0.85至4.63 kPa压力脉冲下的电流响应。e) 在15 kPa高压下超过7000次重复加载/卸载循环的耐久性测试。f) 手腕脉搏的实时监测。g-i) 分别为咽部吞咽、手腕弯曲和肘部弯曲动作的相对电阻变化响应。
传感器的压敏层采用了激光诱导石墨烯(LIG)和PDMS复合材料,形成了具有高压敏性的微结构。测试结果显示(图2c),该传感器在低压区(0.1-3 kPa)灵敏度为10,420 ,而在3-49 kPa的压力范围内,灵敏度达到了26,407 ,表现出超高的压力敏感性。此外,传感器具有快速的响应/恢复时间(约3.8/4.0 ms)、超过7000次的循环稳定性和良好的器件一致性(图2e)。研究人员还展示了其在监测人体生理信号方面的应用,如精确捕捉手腕脉搏的P波、T波和D波(图2f),以及检测吞咽、手腕和肘部弯曲等动作(图2g-i)。
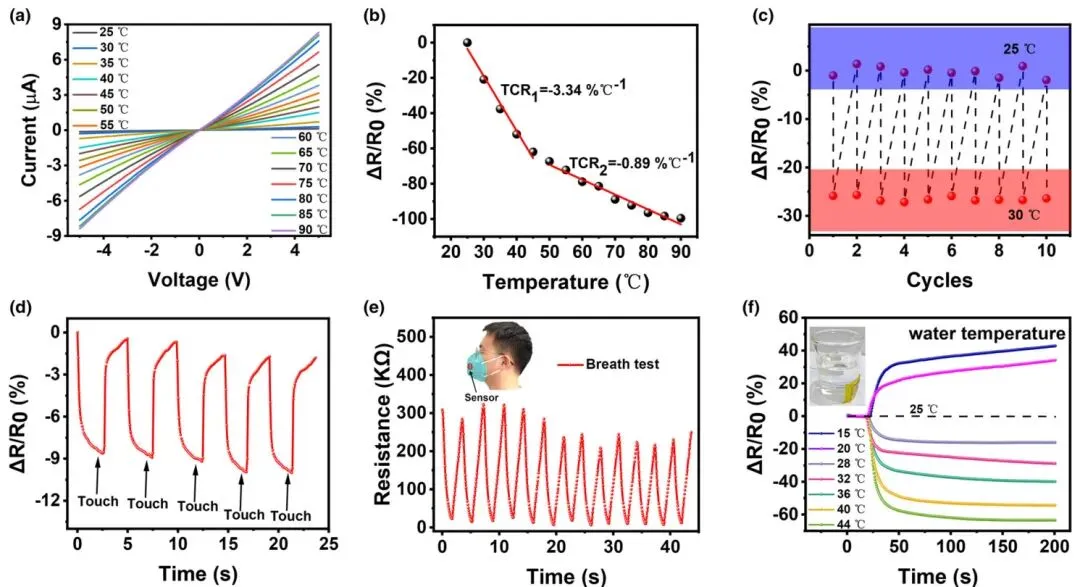
图3. 压力-温度双模态传感器的温感性能表征。 a) 不同温度下传感器的I-V曲线。b) 传感器在25至90 °C温度范围内的电阻变化。c) 传感器在25和30 °C之间重复冷却和加热时的温度感应能力。d) 传感器的触摸响应。e) 通过传感器动态监测呼吸。f) 连接到烧杯的传感器在不同水温(15-44 °C)下的电阻变化。
传感器的温敏层则由自制的NiO油墨构成。测试表明(图3b),在25-45 °C的常用温度范围内,其电阻温度系数(TCR)高达-3.34% ,表现出优异的温度敏感性。传感器能快速响应手指触摸(响应时间0.32s),并能用于监测呼吸模式和不同温度的液体(图3d-f),展现了其在温度检测方面的巨大潜力。重要的是,该双模态传感器能够同时监测压力和温度信号,并通过响应时间的显著差异有效地区分这两种信号。
HZO基互补忆阻器的突触模拟
系统的核心处理单元是一个基于HZO的互补忆阻器,它被用作人工突触,负责处理传感器传来的电信号。
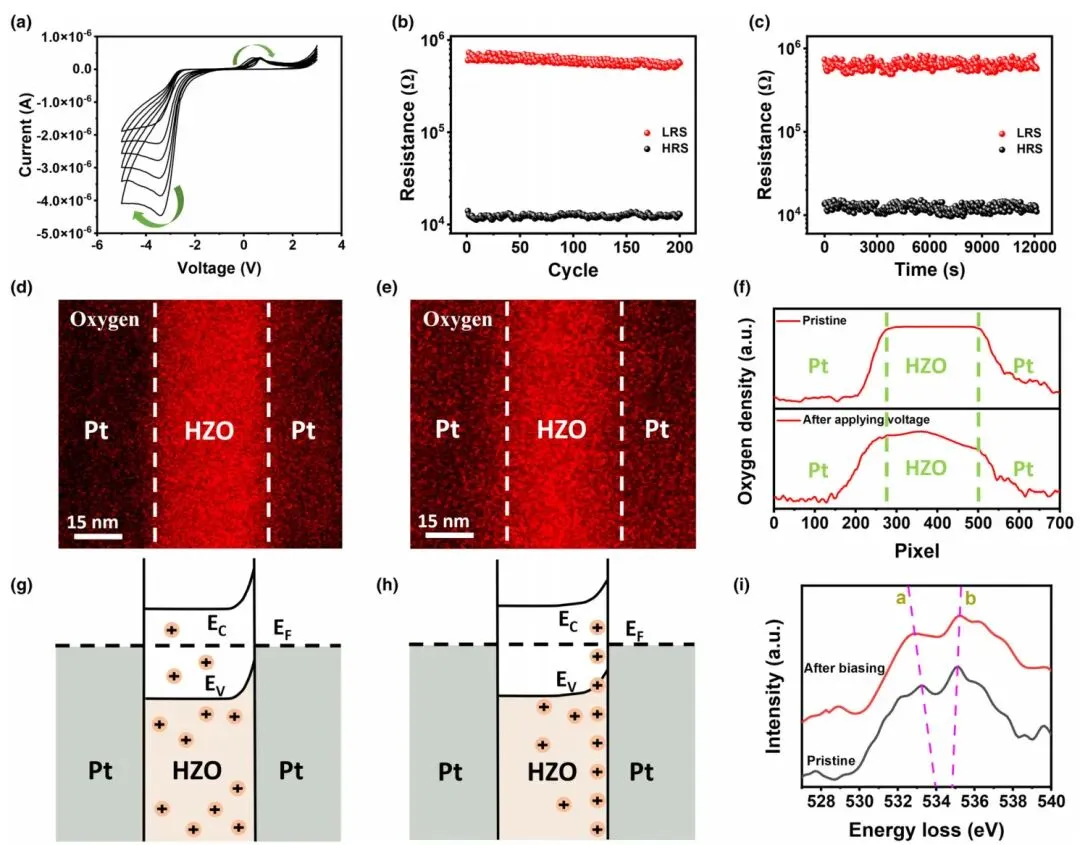
图4. HZO基互补忆阻器的电阻开关特性和导电机理。 a) 在(-5V, 3V)直流扫描范围内的I-V曲线,展示了互补电阻开关行为。b) 忆阻器的耐久性行为。c) 忆阻器高阻态(HRS)和低阻态(LRS)的保持时间。d,e) 样品在原始状态和施加偏压下的氧元素EDS映射图。f) 原始状态和偏压状态下氧密度分布的比较。g,h) 器件在高阻态和低阻态下的能带图。i) HZO薄膜在偏压前后的O K-edge EELS谱。
该忆阻器呈现出典型的互补电阻开关特性,即在正负偏压下均能实现电阻调制(图4a)。它具有稳定的高低阻态(开关比约70)、良好的耐久性(200次循环)和长达1.2 × 10⁴秒的数据保持时间(图4b,c)。通过原位透射电子显微镜(TEM)实验,研究人员揭示了其工作机理:电场作用下,HZO层中的氧空位发生迁移,调节了HZO/Pt界面处的肖特基势垒高度,从而改变了器件的电阻状态(图4g-i)。
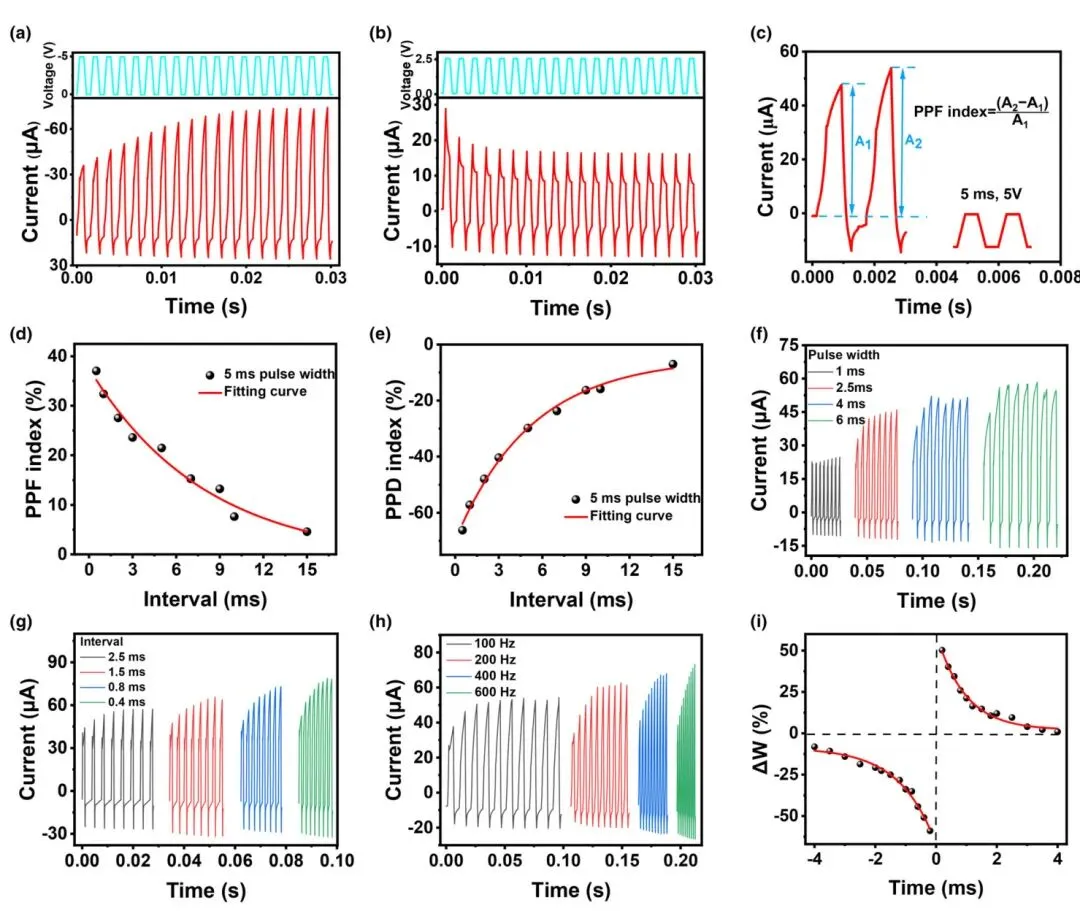
图5. HZO基互补忆阻器的突触行为。 a) 负脉冲下的兴奋性突触后电流(EPSC)可塑性模拟。b) 正脉冲下的抑制性突触后电流(IPSC)可塑性模拟。c) 由两个脉冲触发的双脉冲易化(PPF)。d,e) PPF指数和PPD指数随脉冲间隔时间的变化。f) 脉冲宽度依赖可塑性(SWDP)。g) 脉冲间隔依赖可塑性(SIDP)。h) 脉冲频率依赖可塑性(SRDP)。i) 脉冲时间依赖可塑性(STDP)。
作为人工突触,该忆阻器成功模拟了多种基本的生物突触功能(图5),包括长时程增强(LTP)和长时程抑制(LTD)、双脉冲易化(PPF)和双脉冲抑制(PPD),以及与学习和记忆密切相关的脉冲时间依赖可塑性(STDP)等。这些特性表明,该忆阻器能够有效地执行神经形态计算任务。
系统集成与物体识别应用
为了验证整个系统的感知与识别能力,研究团队将双模态传感器集成到机器人手上,并与HZO忆阻器连接,构建了完整的ACSNS。
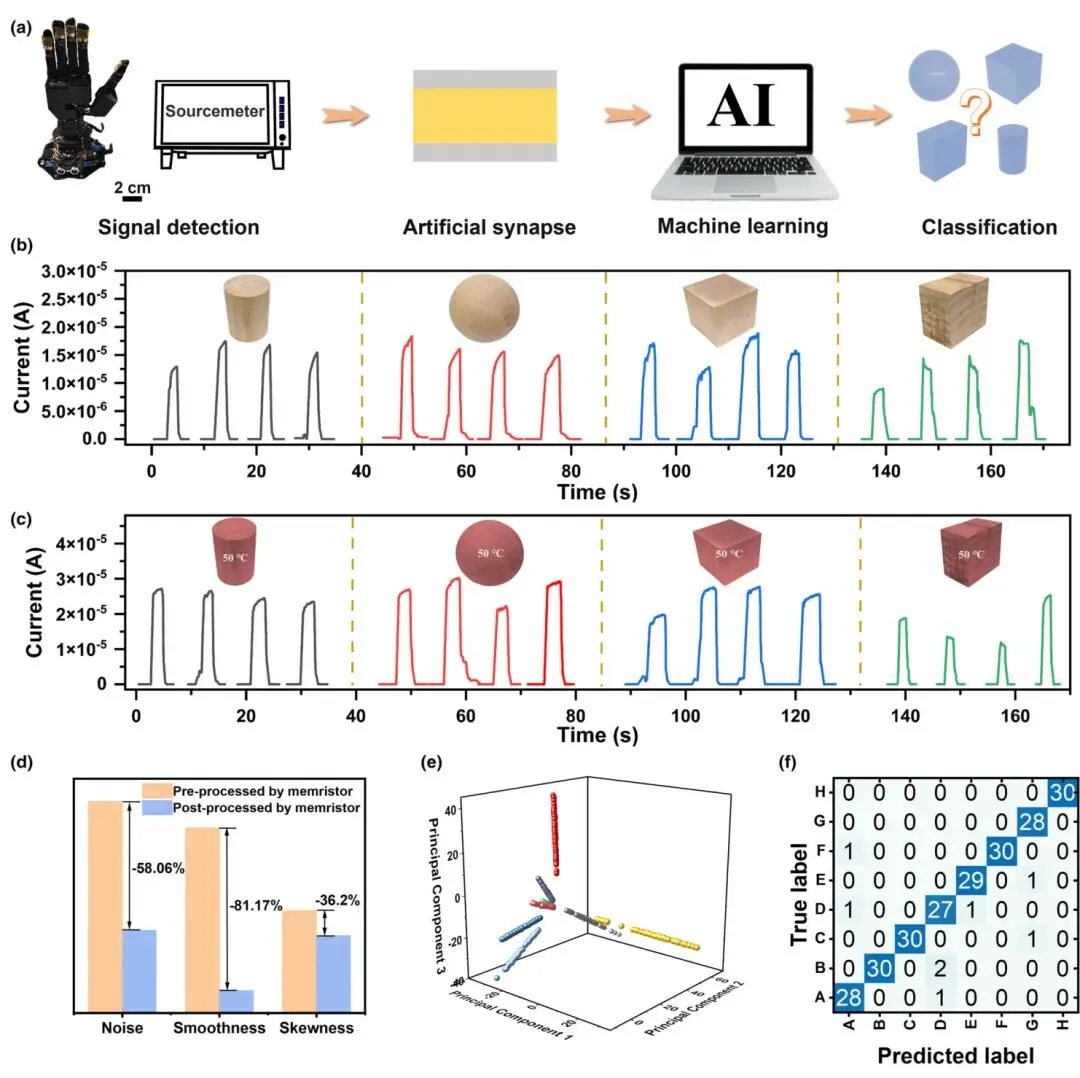
图6. 用于物体识别的ACSNS系统。 a) 不同形状/温度物体分类过程的流程图。b,c) 机器人手抓取25°C和50°C不同形状木块时,经忆阻器处理后的时间电流曲线。d) 忆阻器处理前后信号质量的变化。e) 高维特征的主成分分析(PCA)三维映射。f) 不同形状和温度物体的分类混淆矩阵。
如图6a所示,当机器人手抓取不同形状(圆柱、球形、立方、长方体)和不同温度(25°C、50°C)的物体时,传感器将采集到的触觉信号传递给忆阻器进行处理。对比处理前后的信号(图6b,c),研究发现经忆阻器处理后,信号的噪声降低了58.06%,平滑度降低了81.17%,偏度降低了36.2%(图6d),表明忆阻器显著提升了信号质量,使其更平滑、稳定,有效模拟了生物神经系统对原始感官信号的预处理过程。
随后,研究人员利用tsfresh库从处理后的信号中提取了794个高维特征,并采用主成分分析(PCA)进行降维(图6e)。最后,将这些特征输入到随机森林(Random Forest)机器学习模型中进行分类。结果显示(图6f),该系统对8种不同形状和温度的物体进行分类的准确率达到了96.67%,远高于未经忆阻器处理的数据所能达到的准确率。这一结果证明,该人工交叉模态感觉神经元系统能够在器件层面实现高效的信号处理,并结合机器学习完成高精度的物体识别任务。
总结与展望
本文成功开发了一种人工交叉模态感觉神经元系统(ACSNS),其创新点和未来研究方向可总结如下:
创新点:
- 1. 系统级集成创新: 首次将高性能的压力-温度双模态传感器与HZO基互补忆阻器相结合,构建了一个完整的、模拟生物触觉通路的仿生神经元系统。
- 2. 高性能传感与存储器件: 所制备的双模态传感器展现了极高的压力灵敏度(26,407 )和温度灵敏度(-3.34% );同时,HZO忆阻器具备稳定的互补开关特性和鲁棒的突触功能模拟能力。
- 3. 仿生神经形态处理: 忆阻器作为人工突触,对原始传感器信号进行预处理,显著提高了信号质量,模拟了大脑在进行高级认知前对感官信息的初步处理过程。
- 4. 高精度交叉模态识别: 整个系统结合机器学习算法,实现了对不同形状和温度物体的交叉模态识别,准确率高达96.67%,验证了该技术路线的有效性。
未来展望:
- 1. 多模态感知扩展: 未来的研究可致力于集成更多感知模态,如湿度、硬度、纹理等,以构建功能更全面的电子皮肤,使其更接近人类皮肤的感知能力。
- 2. 系统集成与微型化: 进一步将传感器阵列和忆阻器阵列集成在单一柔性基板上,有望实现更紧凑、可大面积制备的穿戴式设备。
- 3. 高级神经形态计算: 利用忆阻器阵列构建更复杂的神经网络(如脉冲神经网络),以实现更高级的片上(on-chip)数据处理和自主学习,从而减少对外部计算机和传统机器学习算法的依赖。
- 4. 材料与器件优化: 持续优化传感器和忆阻器的材料与结构,以期获得更低的功耗、更高的耐用性、更好的突触权重更新线性度,以及适用于大规模集成的优异器件一致性。
综上所述,这项工作为开发用于感官机器人、电子皮肤和人工智能的先进集成系统铺平了道路。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
