郑州大学电气与信息工程学院王要强教授团队在《郑州大学学报(理学版)》上发表题为:“基于自适应滑模控制器的PMSM调速策略研究”的研究型论文。
Cite: WANG Yaoqiang, WANG Qiuxu, NIE Fuquan, et al. Research on PMSM Speed Control Strategy Based on Adaptive Sliding Mode Controller[J]. Journal of Zhengzhou University(Natural Science Edition), 2025, 57(1): 88-94.
永磁同步电机(permanent magnet synchronous motor, PMSM),凭借其结构简单、高功率密度与卓越的运行效率,已成为航空航天、新能源汽车及高端数控机床等领域的核心动力源。然而,在实际的复杂工况下,电机系统不可避免地会面临参数摄动与外部负载扰动的挑战。传统的PI控制策略往往因抗扰能力不足而难以满足高性能的伺服需求。随着现代控制理论的不断发展,模糊控制、神经网络控制以及模型预测控制等先进策略被相继引入。其中,滑模控制(sliding mode control, SMC)凭借其对外部扰动和模型精度要求低、响应速度快以及强鲁棒性等天然优势,成为了学者的研究热点。
尽管滑模控制展现出巨大的应用潜力,但如何在提升系统动态性能的同时,有效抑制其固有的“抖振”现象,依然是亟待突破的技术瓶颈。现有的改进研究,如引入扩展状态观测器、自适应神经网络或改进趋近律等,虽然在一定程度上优化了控制效果,但在参数调节复杂度、边界层收敛速度等方面仍存在局限。基于此,本文提出了一种新型滑模趋近律控制策略。通过将系统状态变量引入趋近律,并采用sat函数替代传统的开关函数,旨在解决零点附近不连续引发的抖振问题。这一研究不仅显著提升了PMSM控制系统的动态响应与鲁棒性,更为高端电机驱动在极端环境下的精准、稳定运行提供了强有力的理论支撑与技术路径。
构建改进的自适应滑模趋近律,创新性地在趋近律中引入系统状态变量 ∣x∣ 和指数项 eδ∣s∣ 。该设计使得系统在远离滑模面时保持快速趋近以缩短响应时间,而在接近滑模面时自动降低趋近速度,有效解决了传统等速趋近律中趋近速度与抖振难以兼顾的矛盾。
采用 sat 函数抑制边界层抖振,针对开关函数(sgn)在零点不连续导致的固有抖振问题,采用饱和函数(sat)替代常规开关函数。在保证系统响应速度的前提下,利用其在边界层内的线性特性平滑过渡,显著降低了滑模控制的高频抖振,提升了控制精度。
基于积分滑模面的 ASMC 设计,设计了以转速偏差为自变量的积分滑模面,并基于所提趋近律构建了 PMSM 滑模速度控制器。该控制器不仅增强了系统对外部负载扰动的鲁棒性,还通过理论推导验证了其满足李雅普诺夫稳定性条件,确保了系统在有限时间内收敛。
本文提出的 ASMC 控制策略主要包含理论推导、控制器设计与实验验证三个阶段。
在理论推导阶段,首先分析传统等速趋近律的局限性,构建包含系统状态量的新型趋近律表达式,并利用李雅普诺夫方程证明其稳定性;其次,通过仿真对比传统等速趋近律与所提趋近律的控制性能,验证了新方法在趋近速度和抖振抑制方面的优越性。
在控制器设计阶段,基于 d-q 坐标系下的 PMSM 数学模型,选取积分滑模面,结合所提趋近律推导出转速环的控制律,生成 q 轴电流参考值,构建完整的矢量控制框图。
实验阶段在 Matlab/Simulink 仿真环境及基于 RTU-BOX204 的硬件实验平台上,分别进行了空载启动和突加负载实验。结果表明,相较于传统 PI 控制和传统滑模控制,ASMC 控制器在空载启动时无明显超调且响应更快,在突加负载时转速波动更小、恢复时间更短。
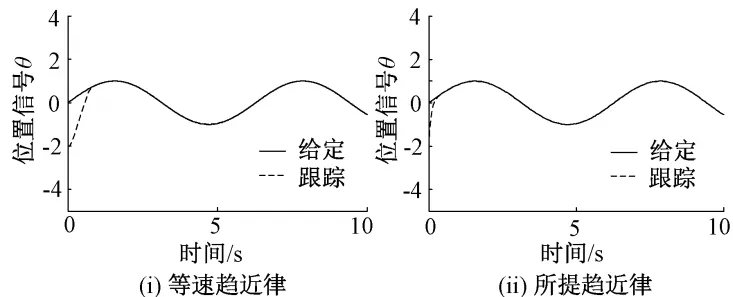
(a)两种趋近律的位置信号跟踪
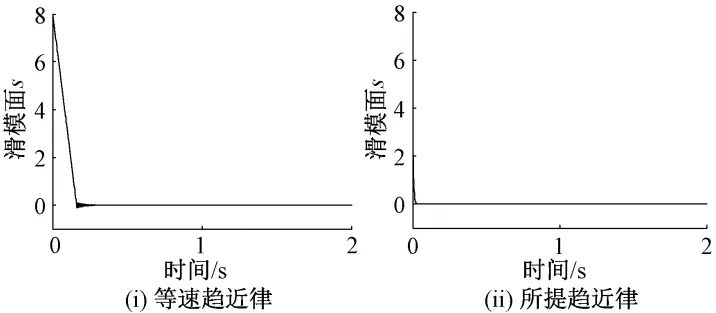
(b)两种趋近律的收敛过程
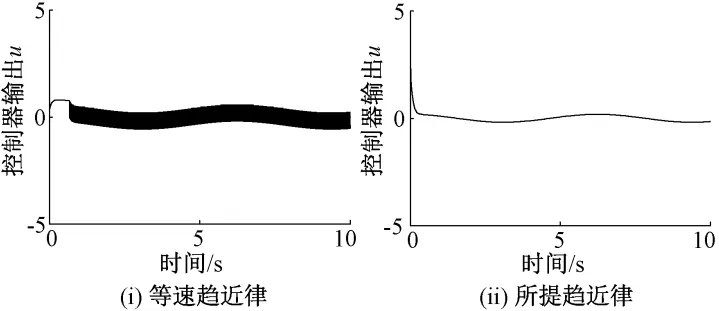
(c)两种趋近律的控制输出
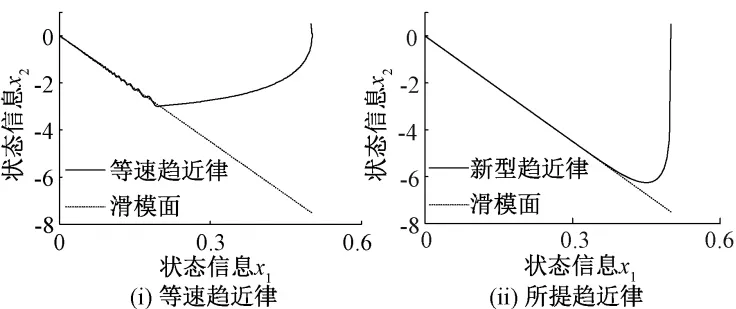
(d)两种趋近律的相轨迹图
图1 等速趋近律与所提趋近律的控制性能仿真结果。该图对比了传统等速趋近律与本文提出的自适应趋近律在相平面内的轨迹。结果显示,提出的趋近律在远离滑模面时具有较大的斜率(快速趋近),而在接近滑模面时斜率平缓(慢速趋近),直观展示了其“远快近慢”的自适应调节特性,有效避免了系统的高频振荡。
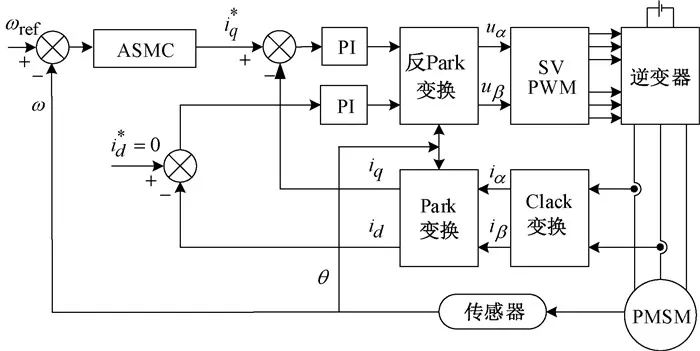
图2 滑模调速控制框图。该图展示了基于ASMC的PMSM双闭环调速系统架构。外环采用ASMC控制器根据转速偏差生成q轴电流参考值,内环采用PI控制器进行电流跟踪,信号经坐标变换与SVPWM调制后驱动电机,清晰体现了ASMC在速度环中的核心作用及系统闭环控制逻辑。
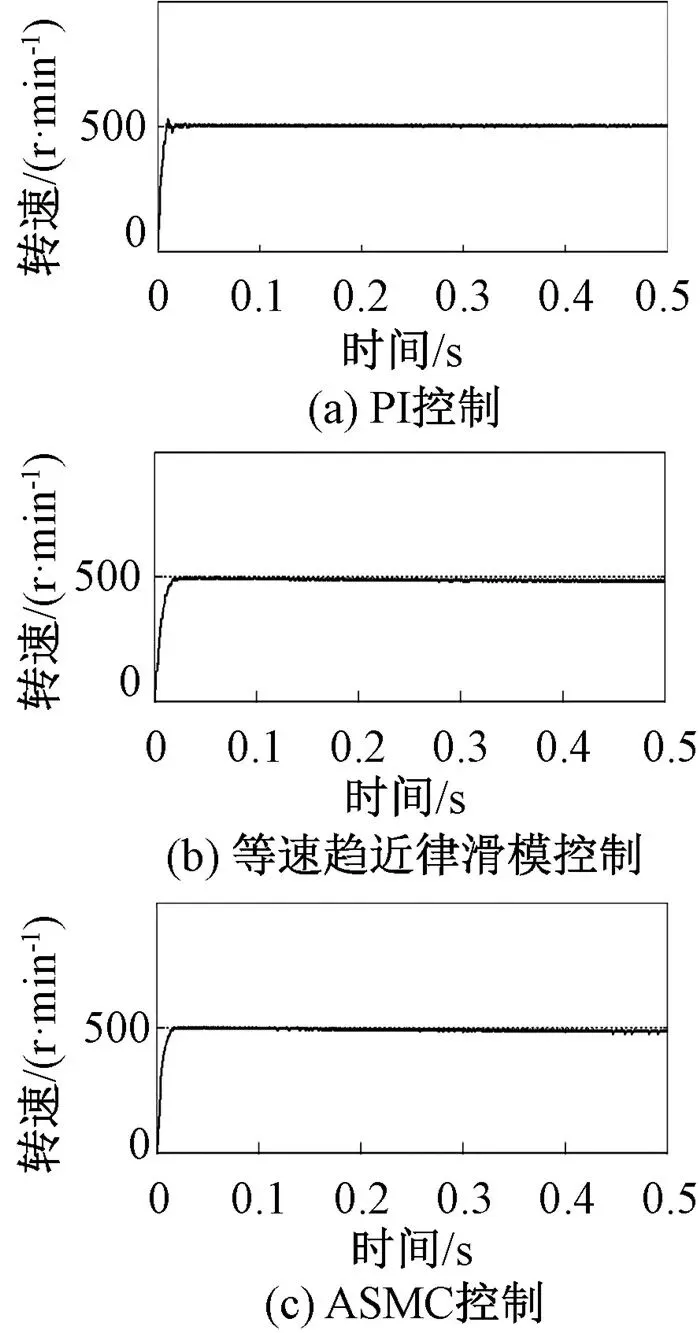
图3 空载启动实验结果图。该图展示不同控制策略下的空载启动响应:展示了 PI 控制、传统滑模控制(SMC)与 ASMC 在 500 r/min 空载启动下的转速波形。ASMC 曲线显示其启动时间最短(约 0.009s)且无超调,而 PI 控制存在明显的超调现象,证明了该算法在动态响应方面的显著优势。
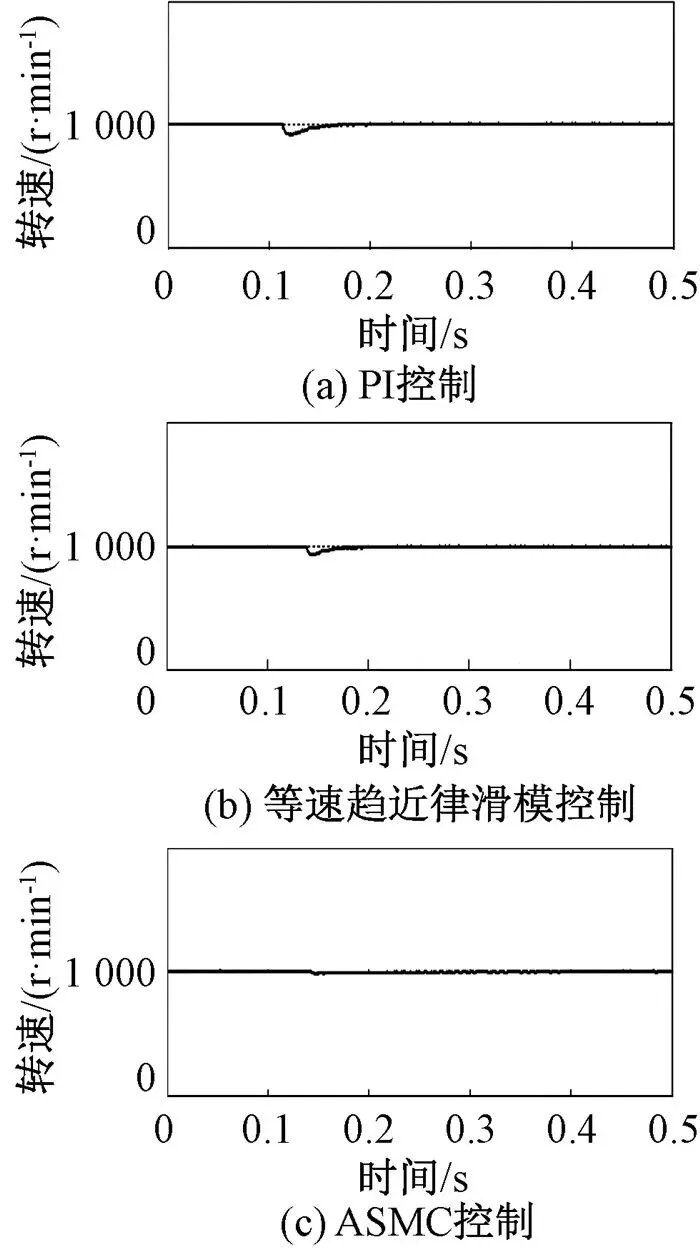
图4 突加负载实验结果图。该图展示了加负载下的抗扰性能对比:对比了三种控制策略在转速 1000 r/min 稳定运行时突加 2 N·m 负载的转速恢复过程。ASMC 控制下的转速跌落最小,恢复时间最短,展现了其在面对外部强干扰时卓越的鲁棒性和抗扰能力,验证了该算法在复杂工况下的工程应用价值。
第一作者:王要强 教授
郑州大学 电气与信息工程学院
研究方向:主要从事新能源电力系统与装备、电力变换与系统控制研究
E-mail:WangyqEE@163.com
引用格式:
王要强, 王秋旭, 聂福全, 等. 基于自适应滑模控制器的PMSM调速策略研究[J]. 郑州大学学报(理学版), 2025, 57(1): 88-94.
WANG Yaoqiang, WANG Qiuxu, NIE Fuquan, et al. Research on PMSM Speed Control Strategy Based on Adaptive Sliding Mode Controller[J]. Journal of Zhengzhou University(Natural Science Edition), 2025, 57(1): 88-94.

扫描上方二维码,或点击文末“阅读原文”查看文献。
https://html.rhhz.net/ZZDXXBLXB/html/20250113.htm



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
